انکودر چیست؟
انکودر چیست؟
انکودر نوعی سنسور است که موقعیت، سرعت یا زاویه یک جسم را اندازهگیری میکند و آن را به سیگنال الکتریکی تبدیل میکند. این سیگنال الکتریکی میتواند توسط کنترلرها یا سایر دستگاهها برای کنترل حرکت، ردیابی موقعیت یا اندازهگیری سرعت استفاده شود.
انکودرها در طیف گستردهای از کاربردها، از جمله صنعت، رباتیک، اتوماسیون و تجهیزات پزشکی استفاده میشوند.
انواع مختلفی از انکودرها وجود دارد که هر کدام مزایا و معایب خاص خود را دارند.
دو نوع اصلی انکودر عبارتند از:
- انکودرهای افزایشی: این نوع انکودرها هر بار که جسم جابجا میشود، تعداد مشخصی پالس ارسال میکنند .
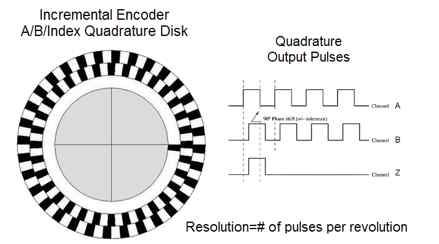
تعداد پالسها نشاندهنده میزان جابجایی است.
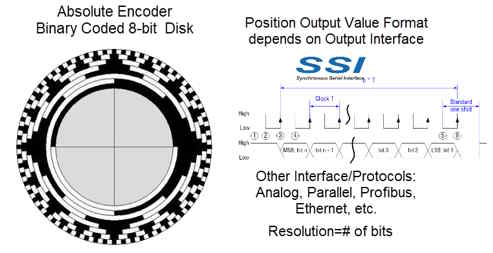
- انکودرهای مطلق: این نوع انکودرها موقعیت مطلق جسم را در هر لحظه ارائه میکنند.
انکودرها همچنین میتوانند بر اساس نوع خروجی خود به دسته های مختلف تقسیم شوند، مانند:
- انکودرهای پالس: این نوع انکودرها سیگنالهای پالس را به عنوان خروجی ارسال میکنند.
- انکودرهای پروتکل: این نوع انکودرها از پروتکلهای ارتباطی مانند SSI یا DeviceNet برای ارسال داده استفاده میکنند.
عوامل مهمی که باید در نظر گرفته شود عبارتند از:
- نوع حرکت: (خطی یا چرخشی)
- دقت: (حداقل وضوح مورد نیاز)
- سرعت: (حداکثر سرعت مورد نیاز)
- محیط: (شرایط محیطی مانند دما، رطوبت و گرد و غبار)
- هزینه
چند نمونه از کاربردهای انکودرها:
- کنترل سرعت موتور: انکودرها برای اندازهگیری سرعت موتور و تنظیم سرعت آن به منظور حفظ سرعت ثابت استفاده میشوند. بطور مثال در موتورهای آسانسور، پالسهای انکودر برای کنترل سرعت حرکت کابین آسانسور استفاده می شوند.
- اندازهگیری سطح مایعات: انکودرها برای اندازهگیری سطح مایعات در مخازن استفاده میشوند.
- کنترل موقعیت ربات: در رباتها، پالسهای انکودر برای کنترل دقیق حرکات بازوها و مفاصل ربات استفاده میشوند.
- تعیین موقعیت چاپگر: در چاپگرها، پالسهای انکودر برای تعیین دقیق موقعیت هد چاپگر و چاپ دقیق تصاویر و متون استفاده میشوند.
- اندازه گیری طول پارچه: در صنعت نساجی، پالس های انکودر برای اندازه گیری دقیق طول پارچه و برش دقیق آن استفاده می شوند.
- کنترل نوار نقاله: در نوار نقالهها، پالسهای انکودر برای کنترل سرعت و موقعیت حرکت مواد بر روی نوار نقاله استفاده می شوند.
نحوه عملکرد:
- انکودر بر روی محور موتور اصلی آسانسور نصب میشود. انکودر از یک دیسک کدگذاری شده و یک هد نوری تشکیل شده است. دیسک کدگذاری شده با علامتگذاریهای منحصربهفرد پوشیده شده است که در هنگام چرخش دیسک توسط هد نوری خوانده میشوند.
مزایای استفاده از انکودر در آسانسور:
- دقت بالا: میتوانند موقعیت و سرعت کابین را با دقت بسیار بالا اندازهگیری کنند.
- قابلیت اطمینان: سخت و بادوام هستند و در برابر شرایط محیطی نامطلوب مانند گرد و غبار و لرزش مقاوم هستند.
- هزینه مناسب: در مقایسه با سایر روشهای اندازهگیری موقعیت، مانند پتانسیومترها، قیمت مناسبتری دارند.
- سهولت نصب: نصب و راهاندازی آسانی دارند.
کاربردهای انکودر در آسانسور:
- کنترل حرکت آسانسور: برای کنترل سرعت و جهت حرکت کابین آسانسور استفاده میشود.
- تراز کردن طبقات: برای تراز دقیق کابین آسانسور با طبقات استفاده میشود.
- ایمنی: برای تشخیص موقعیت دقیق کابین آسانسور و جلوگیری از حرکت ناخواسته آن استفاده میشود.
- صرفهجویی در انرژی: برای بهینهسازی مصرف انرژی آسانسور و کاهش مصرف برق آن استفاده میشود.
در انکودر، پالس سیگنالی الکتریکی است که هر بار که شافت یا محور موتور یا هر دستگاه دوار دیگر یک دور کامل می چرخد، تولید میشود. تعداد پالسها در هر دور کامل را رزولوشن انکودر مینامند.
همانطورکه گفته شد، انکودرها بر اساس نوع خروجی خود به دو دسته افزایشی و مطلق تقسیم می شوند:
- انکودرهای افزایشی(Incremental Encoder ): در هر چرخش کامل، تعداد ثابتی پالس تولید میکنند. این پالسها برای اندازه گیری سرعت دورانی موتور استفاده می شوند. با این حال، برای تعیین موقعیت زاویهای مطلق موتور به یک مرجع اولیه نیاز دارند.
- انکودرهای مطلق(Absolute Encoder): در هر موقعیت زاویهای، یک کد منحصر به فرد را تولید میکنند. این کد برای تعیین موقعیت زاویهای دقیق موتور در هر لحظه استفاده میشود و نیازی به مرجع اولیه ندارند.
تعداد پالسها در هر دور کامل (ppr) یکی از مهمترین مشخصات انکودر است. هر چه رزولوشن انکودر بالاتر باشد، دقت اندازه گیری زاویه و سرعت دورانی نیز بیشتر خواهد بود.
تفاوت انکودرهای ۱۳۱۳، ۱۳۲۵ و ۱۳۸۷ هایدن هاین:
انکودر ۱۳۱۳، ۱۳۲۵ و ۱۳۸۷ همگی از محصولات شرکت هایدن هاین (Heidenhain) هستند که برای اندازهگیری زاویه و سرعت دورانی در موتورها و سایر تجهیزات دوار استفاده میشوند. با این حال، بین این مدلها، چند تفاوت کلیدی وجود دارد:
نوع انکودر:
- ۱۳۱۳: انکودر افزایشی (Incremental)
- ۱۳۲۵: انکودر مطلق (Absolute)
- ۱۳۸۷: انکودر مطلق (Absolute)
- نحوه خروجی:
- ۱۳۱۳: پالس
- ۱۳۲۵: پروتکلهای مختلف (مانند SSI، Profibus، DeviceNet)
- ۱۳۸۷: پالس
رزولوشن:
- ۱۳۱۳: 1 تا ۲۰۴۸ پالس در دور
- ۱۳۲۵: 1 تا ۳۶ بیت
- ۱۳۸۷: 1 تا ۲۰۴۸ پالس در دور
رزولوشن به تعداد پالسهای تولید شده توسط انکودر در هر دور کامل موتور اشاره دارد. رزولوشن بالاتر، دقت اندازهگیری زاویه و سرعت را افزایش میدهد.
کاربرد:
- ۱۳۱۳: کاربردهای عمومی مانند کنترل سرعت و موقعیت موتورها
- ۱۳۲۵: کاربردهایی که نیاز به دقت و قابلیت اطمینان بالا دارند، مانند سروو موتورها و سیستمهای کنترل موقعیت
- ۱۳۸۷: کاربردهایی که نیاز به دقت و قابلیت اطمینان بالا دارند و در فضاهای محدود نصب میشوند، مانند رباتها و بازوهای مکانیکی
مشخصات فیزیکی:
- ۱۳۱۳: ابعاد و شکلهای مختلف
- ۱۳۲۵: ابعاد و شکلهای مختلف
- ۱۳۸۷: ابعاد کوچک و فشرده
قیمت:
- ۱۳۱۳: ارزانترین
- ۱۳۲۵: متوسط
- ۱۳۸۷: گرانترین
نکات:
- انتخاب انکودر مناسب به نیاز و کاربرد خاص شما بستگی دارد.
- برای اطلاعات بیشتر در مورد هر انکودر، میتوانید به وب سایت هایدن هاین یا دیتاشیتهای مربوطه مراجعه کنید.
خلاصهای از تفاوتهای کلیدی بین سه انکودر:
| ویژگی | انکودر ۱۳۱۳ | انکودر ۱۳۲۵ | انکودر ۱۳۸۷ |
| نوع | افزایشی | مطلق | مطلق |
| خروجی | پالس | پروتکلهای مختلف | پالس |
| دقت | ۱ تا ۲۰۴۸ پالس در دور | ۱ تا ۳۶ بیت | ۱ تا ۲۰۴۸ پالس در دور |
| کاربرد | عمومی | دقت بالا | دقت بالا و فضای محدود |
| ابعاد | متنوع | متنوع | کوچک |
| قیمت | ارزان | متوسط | گران |
نویسنده: دکتر کیوان رستم پور


دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.